PUBLICATION
Now
Prof. Dr. Ardian Jusufi
Group Leader · Soft Kinetics, Empa & UZH
Bio-inspired soft robotics, locomotion stability, and morphological computation.
EMPA
Empa & UZH · Soft Kinetics, current
2026
-
-
AWARD
Women Rising in STEM — Certificate of Acknowledgment
Women Rising in STEM
6 Mar 2026
Recognised for support and contributions to women rising in STEM.
2025
-
Bioengineer.org
Mastering tree canopies: how scaly tails enable safe navigation
Study shows how the scaly tail organ of Pel's flying squirrel enhances static stability during arboreal locomotion across slippery tree surfaces.
1 Sept 2025
-
Interesting Engineering
Flying Squirrels inspire next-gen bionic robot drones
How the unique scaly-tail morphology of Pel's flying squirrel is inspiring the design of next-generation bionic robot drones.
1 Sept 2025
-
Book Feature
Interview in 'Physics Around the Clock' by Michael Banks
Prof. Jusufi was interviewed for 'Physics Around the Clock: Adventures in the Science of Everyday Living' by science journalist Michael Banks, discussing bio-inspired robotics.
1 Sept 2025
-
Swiss Confederation
Swiss Federal News: Scaly-tail squirrel research at Empa
Official Swiss Federal news release covering the Soft Kinetics Group's research on how scaly-tail organs enhance stability in arboreal mammals.
1 Sept 2025
-

Soft Kinetics Group, 2 July 2025. -
-
Phys.org
Phys.org: Spikes on the scaly-tailed squirrel's tail aid climbing
Research on how spike-like scales on the scaly-tailed squirrel's tail provide grip and stability during arboreal locomotion.
1 Jun 2025
-
Science Magazine
Science: These squirrels' scaly tails help them climb slippery trees
Science magazine reports on new findings showing how Pel's scaly-tailed flying squirrels use a unique keeled-scale organ on the tail underside to grip smooth bark.
1 Jun 2025
2024
-
-
-
PUBLICATION
Tail Use for Postural Stabilization in Captive Cheetahs during Routine Transportation
-
-
Research methods — additional view. -
Research methods — experimental setup.
2023
-
Empa & UZH · Soft Kinetics, current
Senior Researcher, Institute for Neuroinformatics, UZH
University of Zurich, Switzerland
Joined the Institute for Neuroinformatics (INI) at UZH as a senior researcher, with affiliation also at the ETH Center for Learning Systems.
-
-
-
MEDIA
Soft Robotics Symposium at PPS38
The group chaired the Soft Robotics Symposium at PPS38, attended by Profs. Rob Shepherd, Yong Lae Park, and Caecilia Laschi.
10 Jul 2023
-
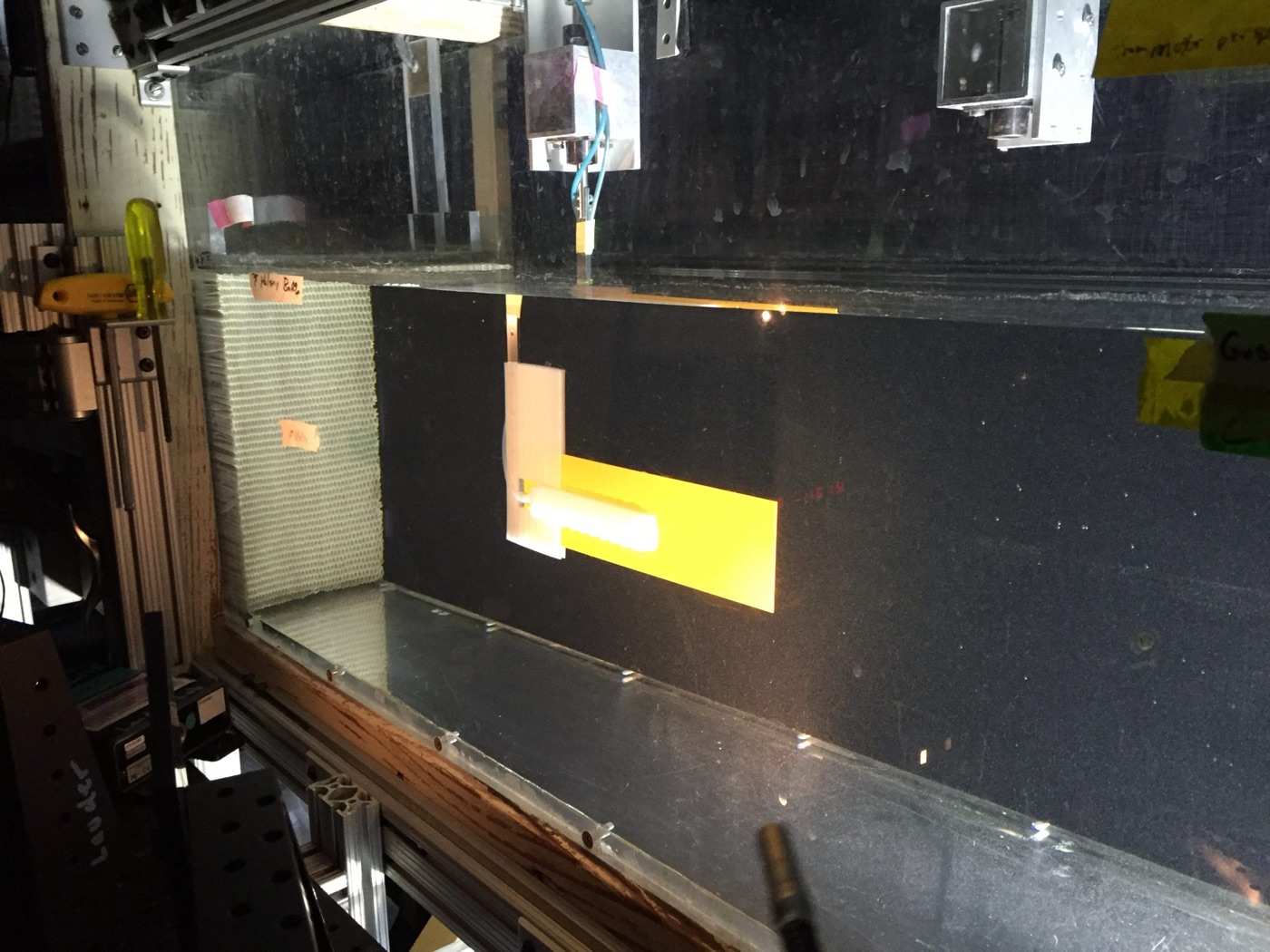
Experiments in the Soft Kinetics Group laboratory. -
Inside the Soft Kinetics Group laboratory. -

Fieldwork with the Soft Kinetics Group. -

Field experiments with the Soft Kinetics Group. -
The Guardian
The Guardian: Tail does not wag the dog when it comes to agility, scientists find
The Guardian reports on research showing that, contrary to popular belief, the tail plays a limited role in dog agility — challenging assumptions about appendage function in locomotion.
2 Jan 2023
2022
-
Empa & UZH · Soft Kinetics, current
Honorary Associate Professor, Macquarie University
Macquarie University, Sydney, Australia
Appointed Honorary Associate Professor at Macquarie University, continuing collaborations on bio-inspired locomotion and biomechanics.
-
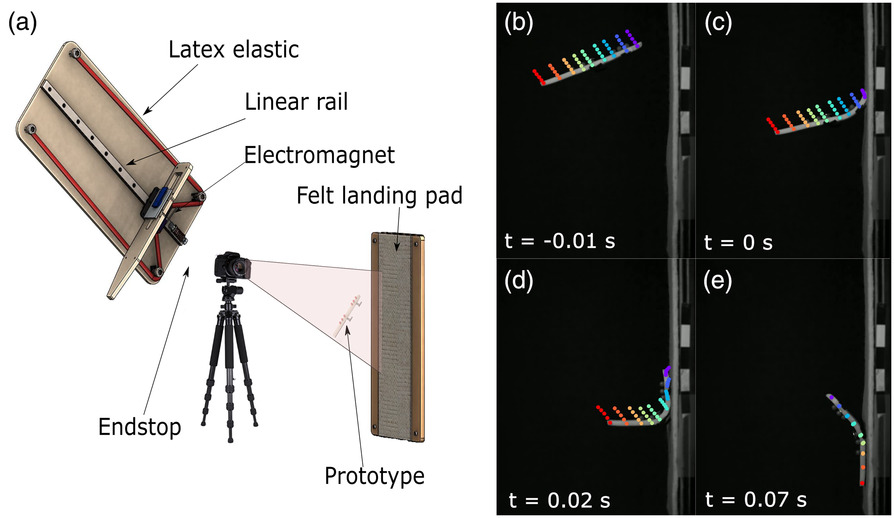
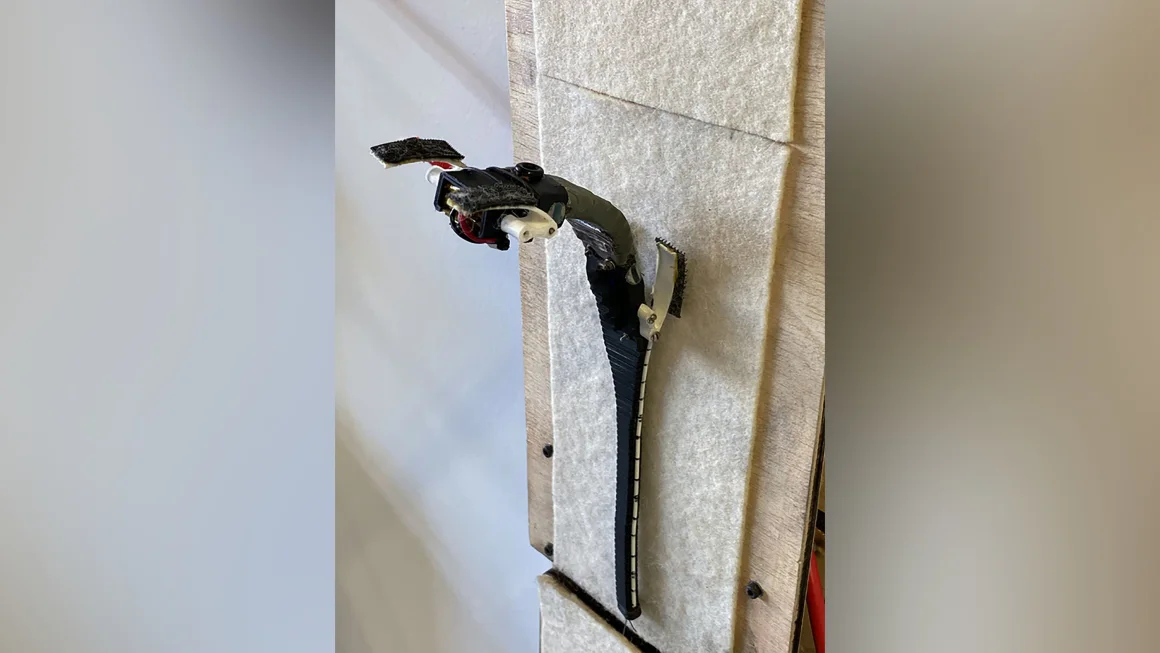
Morphologically adaptive crash landing on a wall. -
-
-
Empa & UZH · Soft Kinetics, current
Founded the Soft Kinetics Group at Empa
Empa, Swiss Federal Laboratories for Materials Science and Technology
Founded the Soft Kinetics Group at the Engineering Sciences Department, Empa, focused on bio-inspired robotics, soft materials, and embedded sensing.
MPI
MPI Stuttgart · Independent Group Leader
2021
-
CNN
CNN: The gecko's most astounding maneuver has nothing to do with its sticky feet
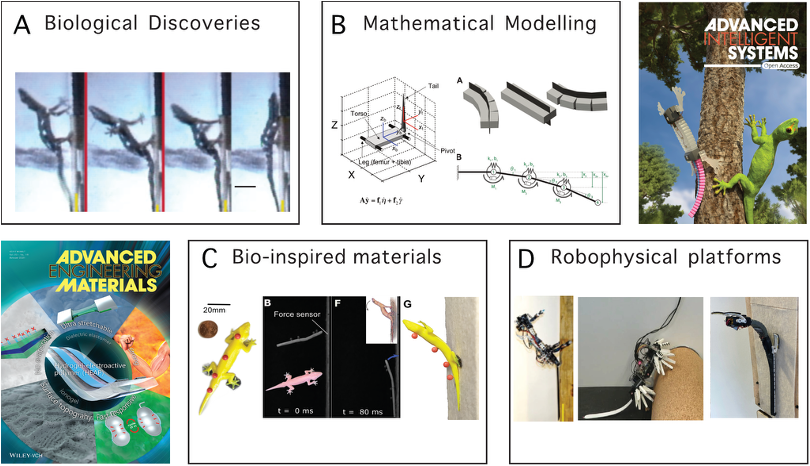
CNN covers the Soft Kinetics Group's research on how gliding geckos use active tail reflexes to crash-land head-first into tree trunks — inspiring a new class of soft-bodied robots.
2 Sept 2021
-
Science Magazine
Science: Watch a gecko smash headfirst into a tree and still stick the landing
Science magazine covers the discovery that gliding geckos stabilise their crash landings using rapid tail reflexes, with implications for soft robot design.
1 Sept 2021
-
Robot gecko study — bio-inspired locomotion. -
-
-
-
-
-
-
AWARD
Editorial Board, Bioinspiration & Biomimetics
Institute of Physics Publishing
1 Jan 2021
Appointed to the editorial board of Bioinspiration & Biomimetics.
View certificate ↗ -
Advanced Intelligent Systems — cover article.
2020
-
-
-
IDW Online
IDW: Swimming robot gives valuable insights into locomotion of fish
IDW (Informationsdienst Wissenschaft) press release covering a soft swimming robot study that yields insights into the locomotion of fish.
9 Jun 2020
2019
-
PUBLICATION
Heads or tails? Cranio-caudal mass distribution for robust locomotion with biorobotic appendages composed of 3D-printed soft materials
-
2018
-

MPI Stuttgart · Independent Group Leader
Independent Max Planck Research Group Leader
MPI for Intelligent Systems, Stuttgart, Germany
Established and led the Locomotion in Biorobotics and Somatosensing group at the Max Planck Institute for Intelligent Systems.
-
SYDNEY
Sydney · UTS Lecturer
2017
-
AWARD
Outstanding Poster Award
AMAM 2017, Hokkaido University, Japan
15 Aug 2017
Recognised for outstanding poster contribution at the International Symposium on Adaptive Motion of Animals and Machines.
View certificate ↗ -
PUBLICATION
A comparative survey of climbing robots and arboreal animals in scaling complex environments
-
PUBLICATION
A study of rapid tetrapod running and turning dynamics utilizing inertial measurement units in greyhound sprinting
-
2016
-

Sydney · UTS Lecturer
Lecturer / Assistant Professor, UTS Sydney
University of Technology Sydney, Australia
Began teaching and research as a faculty member in the Faculty of Engineering and Information Technology, focusing on bio-inspired robotics and soft systems.
CAMBRIDGE
Cambridge & Harvard · Postdocs
2012
-

Cambridge & Harvard · Postdocs
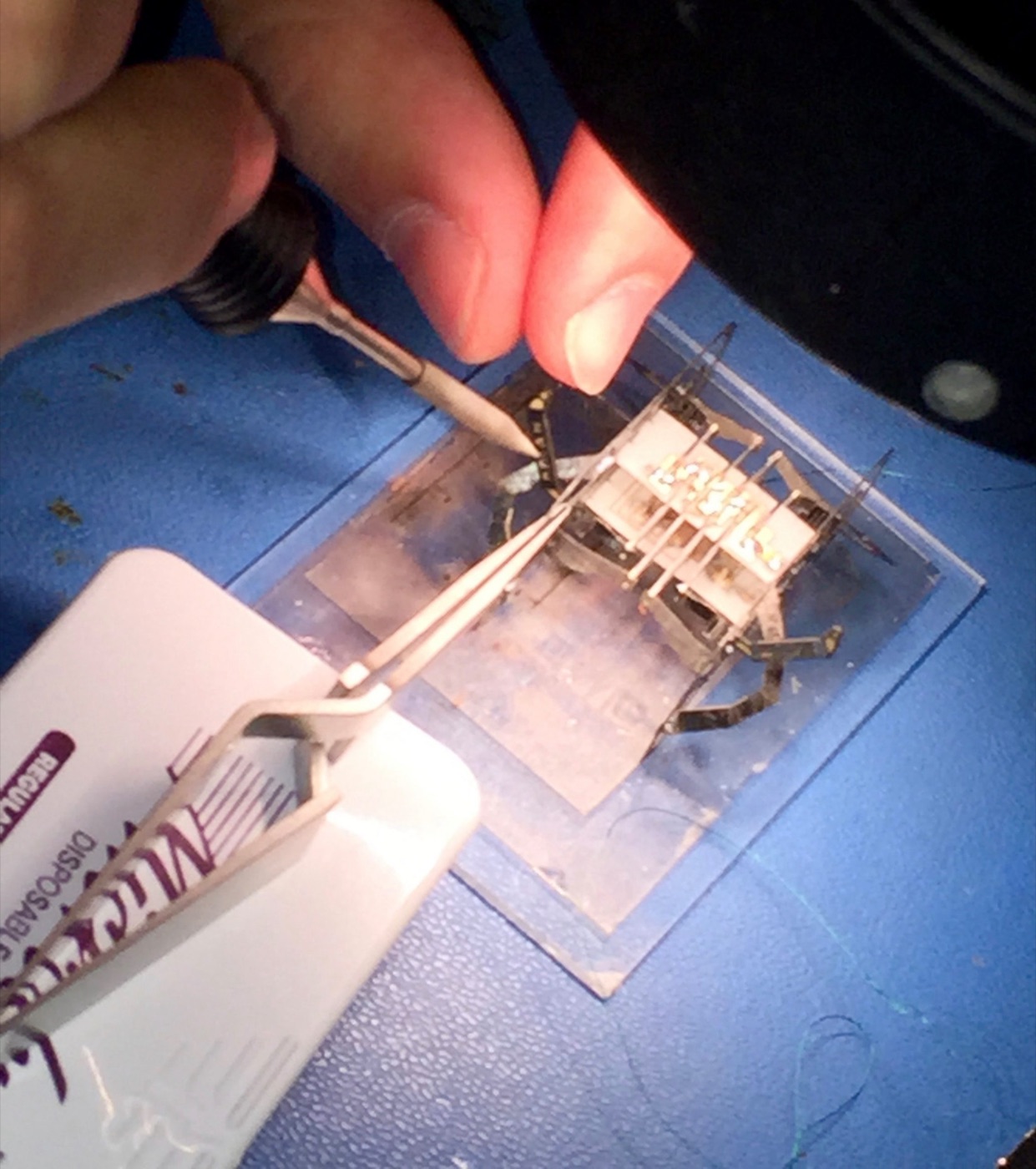
Postdoctoral Researcher, Harvard MicroRobotics Lab
Harvard University, Cambridge, MA, USA
Joined Prof. Robert Wood's MicroRobotics Lab to work on small-scale soft and compliant robotic systems.
-
-
-
Nature
Nature News: Leaping lizards! Jurassic Park got it right
Nature News reports that Jurassic Park's depiction of dinosaurs using their tails for balance was scientifically accurate — supported by new research on tail-assisted pitch control.
1 Jul 2012
-
Robaid
Robaid: RightingBot — landing ability inspired by lizards
Robotics news site Robaid profiles RightingBot, a bioinspired robot whose mid-air self-righting capability is derived from observations of lizard tail mechanics.
1 Jul 2012
-
Science Daily
Science Daily: Falling lizards use tail for mid-air twist, inspiring 'RightingBot'
Science Daily reports on the discovery that lizards use inertial tail rotation to right themselves mid-air during falls, leading to the creation of the bioinspired 'RightingBot'.
1 Jul 2012
-
Science Illustrated
Science Illustrated: Meet RightingBot, the lizard-inspired robot
Science Illustrated profiles RightingBot, demonstrating how biomechanical insights from lizard locomotion are translated into a robot capable of controlled mid-air reorientation.
1 Jul 2012
-
Welt der Physik
Welt der Physik: Langer Hebel für fallende Eidechsen
German physics news outlet covers the research on how lizards use their tails as a long lever to control body rotation during free fall.
1 Jul 2012
-
Los Angeles Times
LA Times: The trick that geckos and cockroaches taught a robot
The Los Angeles Times covers research showing how geckos and cockroaches swing under ledges like a pendulum — a manoeuvre now replicated in a robot.
6 Jun 2012
-
PLoS ONE
PLoS ONE: Rapid inversion — running animals and robots swing like a pendulum
Coverage of the PLoS ONE paper by Mongeau, McRea, Jusufi et al. demonstrating rapid inversion locomotion in geckos and cockroaches, with robotic implementation.
1 Jun 2012
2011
-
PUBLICATION
Aerial righting reflexes in flightless animals
2010
-
The New York Times
New York Times: It's a Bird. It's a Plane. No, It's a Flying Snake.
The New York Times covers research on how flying snakes generate lift, featured alongside work on other airborne animals that inspire bio-inspired aerial robots.
30 Nov 2010
-
MSNBC
MSNBC: Nature inspires flying machines
MSNBC Cosmic Log reports on how natural fliers — from snakes to geckos — are informing the design of the next generation of bio-inspired flying machines.
24 Nov 2010
-
Cambridge & Harvard · Postdocs
Postdoctoral Researcher, Cambridge
Queens' College, Cambridge, UK
Postdoctoral research at the University of Cambridge, Queens' College, focusing on bio-inspired locomotion and aerial righting in arboreal animals.
-
BERKELEY
Berkeley · PhD with Prof. Full
2009
-
AWARD
Outstanding Teaching Award
University of California, Berkeley
15 May 2009
Recognised for excellence in teaching during graduate studies at UC Berkeley.
View certificate ↗
2008
-
-
The New York Times
New York Times: When a sticky gecko starts to slip, its tail comes to the rescue
The New York Times Observatory column reports on research showing that geckos use active tail movements to regain balance and prevent falls during rapid locomotion.
18 Mar 2008
-
New Scientist
New Scientist video: Acrobatic geckos steer with tails
New Scientist video showcasing high-speed footage of geckos using tail rotations to steer and stabilise during arboreal acrobatics — the research that launched the active-tail robotics programme.
1 Jan 2008
2005
-

Berkeley · PhD with Prof. Full
Began PhD at UC Berkeley
Berkeley, California, USA
Started doctoral research at the Center for Interdisciplinary Bio-inspiration in Education and Research (CiBER) under the supervision of Prof. Robert Full.
For a complete list of publications, see the Google Scholar profile · ORCID · Publications page.