Soft Kinetic Group – University of Zurich
Bodies as Active Participants in Intelligence
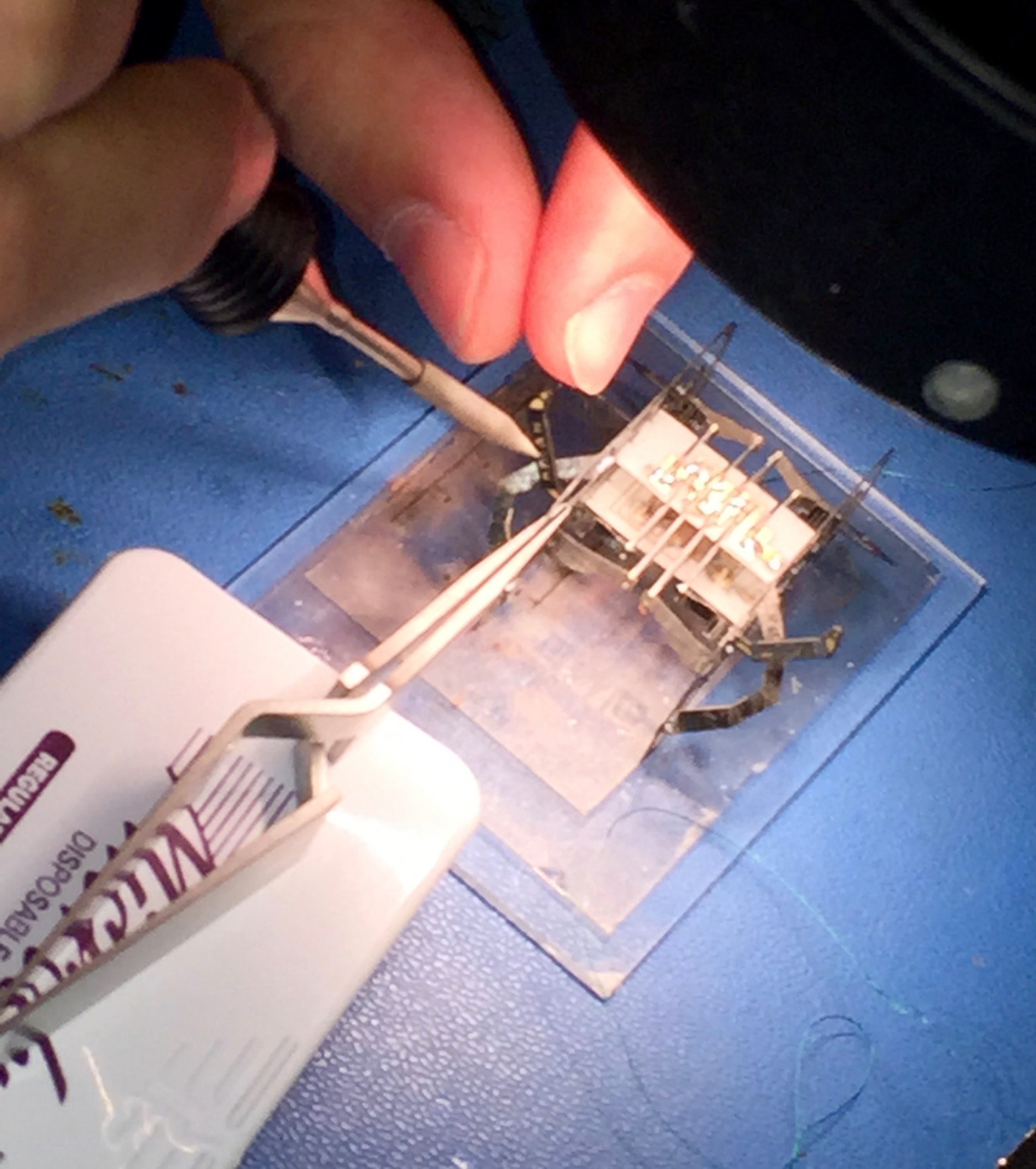
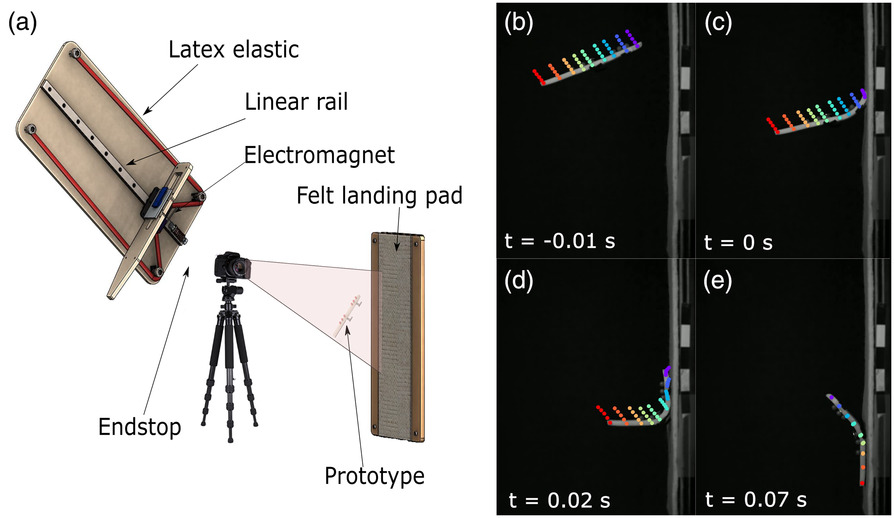
We develop bio-inspired robotic systems that use soft materials, embedded sensing and active structures.
Research Group Focus
Agile Soft Robotics through Physical AI
We develop bio-inspired robotic systems that use soft materials, embedded sensing, active structures, and control for contact-rich environment interaction.
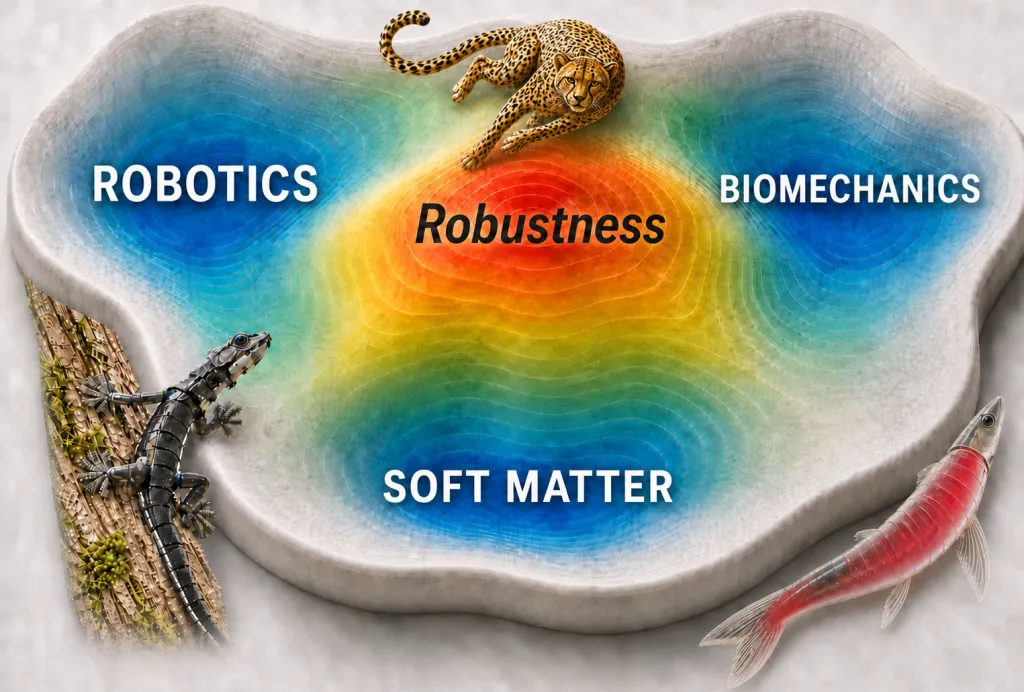
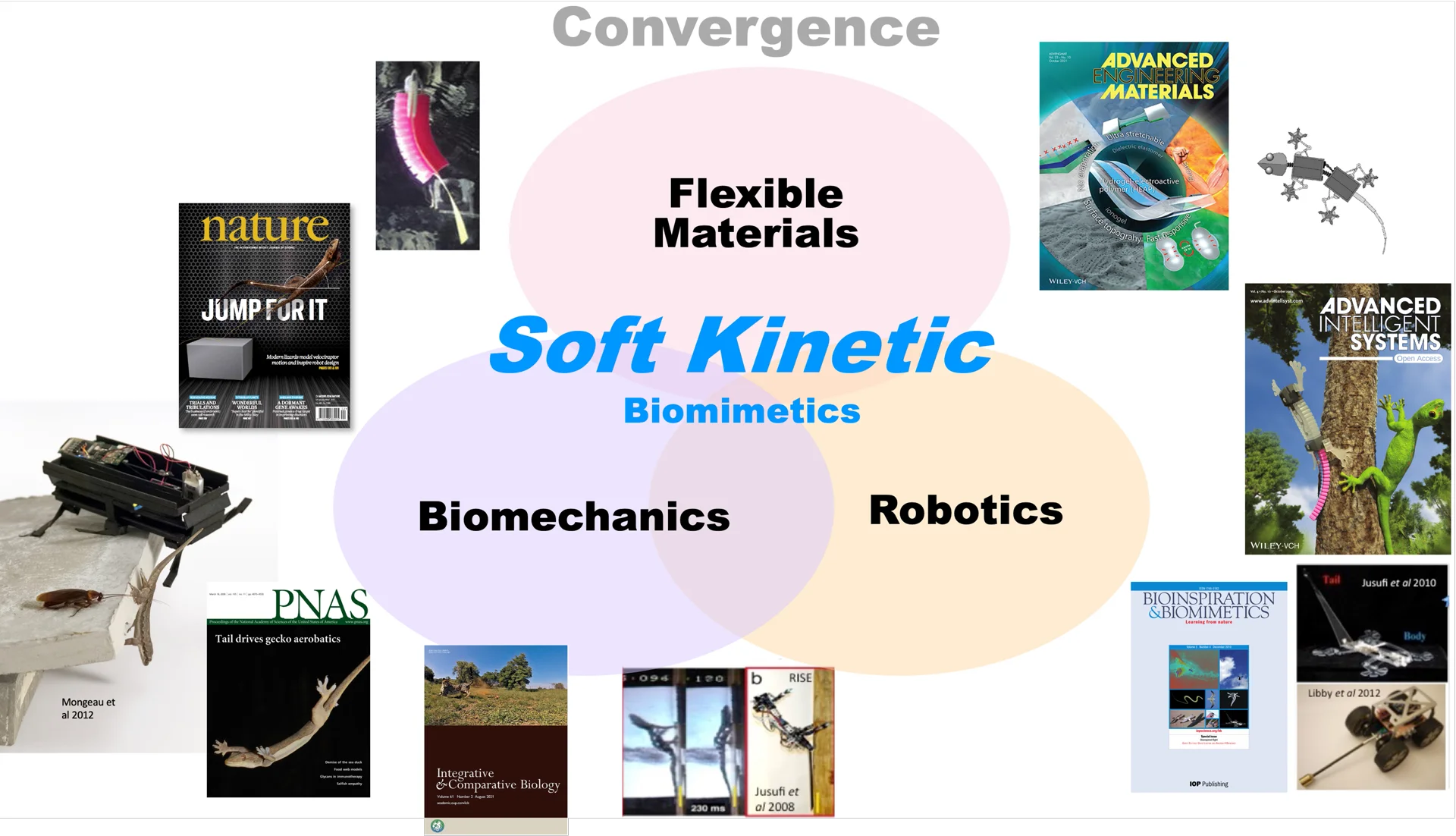
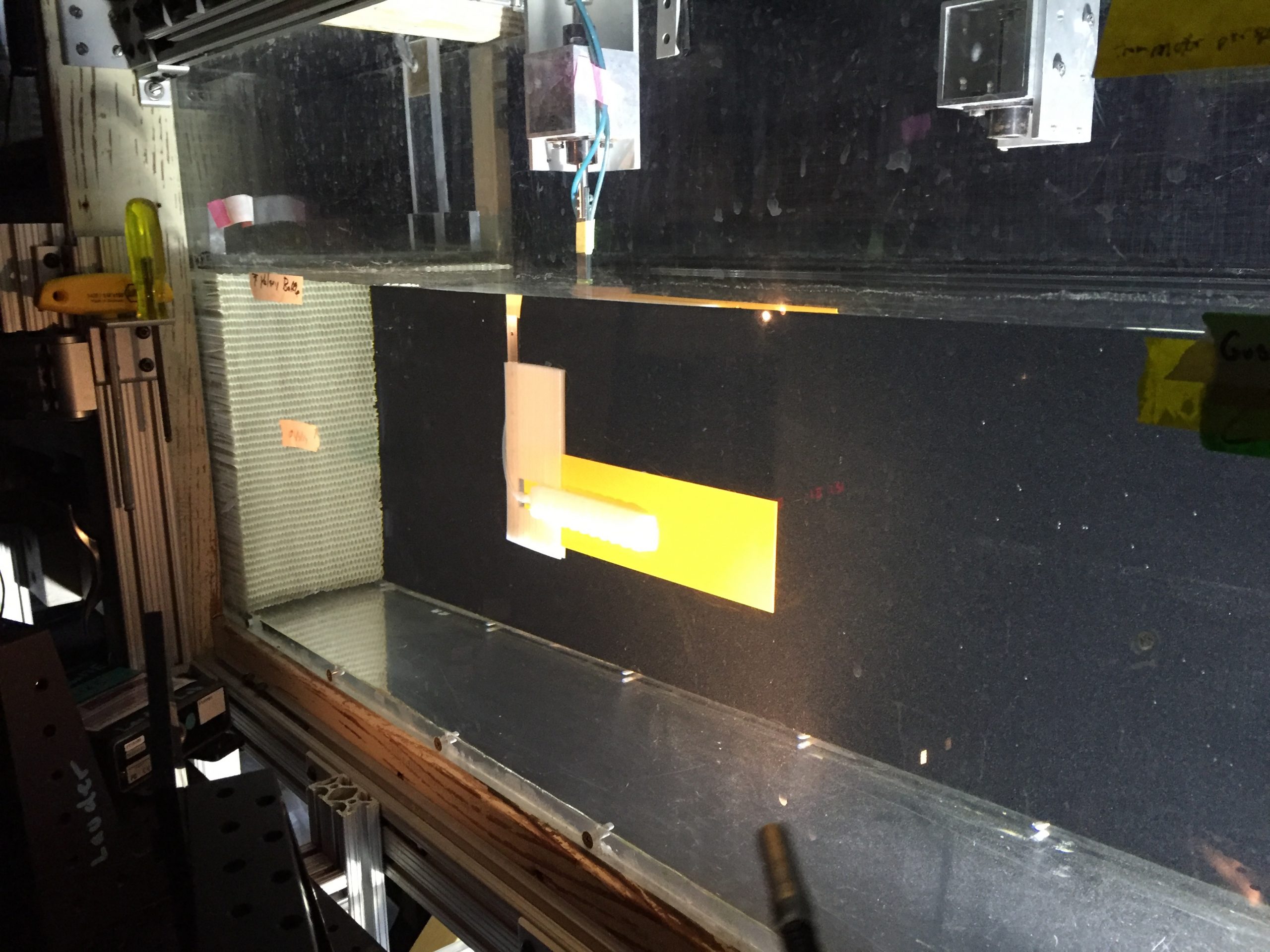
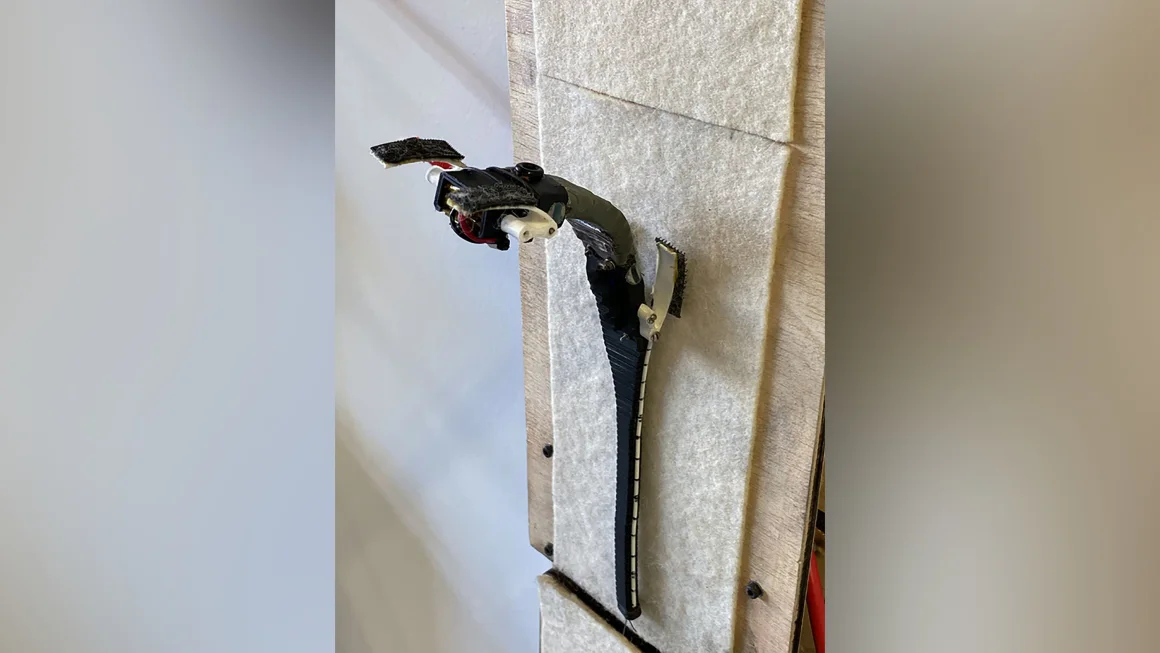
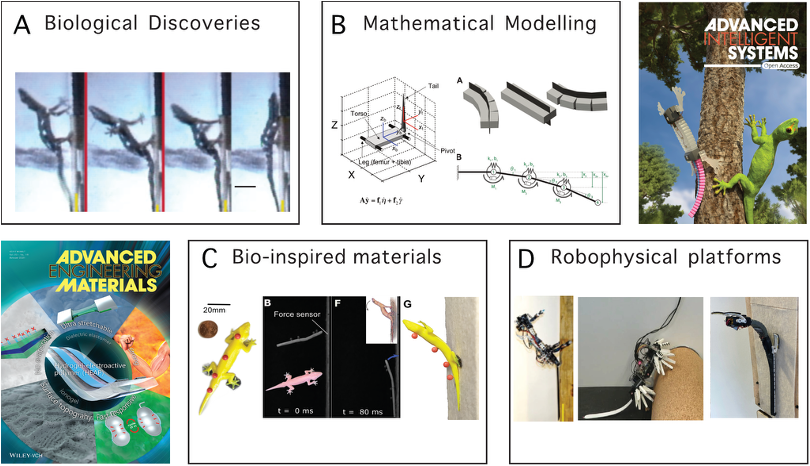
Our research investigates how bodies contribute to intelligence. Biological systems use compliant morphology and distributed sensing to stabilize motion by absorbing impact and exploiting contact. We translate these principles into robotic systems that combine dynamical systems, control, and mechanical metamaterials.
Rather than treating the body as passive hardware, we study it as an active part of computation and control. How motor-controlled tuning of soft body mechanics helps robots stabilize, absorb impact, and exploit contact through the coupled dynamics of body, control, and environment.
Media & Activities
Research in Action
























Biosketch
Prof. Dr. Ardian Jusufi
- PhD University of California at Berkeley, under supervision of Prof. Robert Full at the CiBER center.
- Postdocs University of Cambridge, Queens' College. MicroRobotics Lab at Harvard University with Prof. Robert Wood.
- Lecturer [Assist. Prof.] Faculty of Engineering and Information Technology, University of Technology Sydney from 2016.
- Group Leader [Assoc. Prof.] Independent Max Planck Research Group Leader at MPI for Intelligent Systems through 2023. Founded Soft Kinetic Group at Engineering Sciences Department at the Swiss Federal Labs for Materials Science and Technology in 2022.
- Affiliated Group Leader University of Zurich Institute for NeuroInformatics INI, and ETH Center for Learning Systems, current.
- Hon. Associate Professor Macquarie University Sydney since 2022.
- Grants Swiss National Science Foundation (2 projects), the Cyber Valley Research Fund, and the Max Planck Society.